Modellezés
FPV repülés
AZ FPV a First Person View kifejezés rövidítése.
Jelentése: kamera segítségével irányított légi jármű. A pilóta és a gép közötti kapcsolat egy vezeték nélküli rendszeren jön létre. A gép távirányítása 2,4GHz frekvencián digitális kódolással, a kameráról a kép analóg FM modulálással (mint a régi műholdas TV) 5,8GHz frekvencián kerül a földi vevő egységbe, illetve a nagy távolságú repülés esetén (>3km) a távirányítás 434MHz-en 70cm-es
rádióamatőrsávon, a videójel leküldése 1240MHz-en a 23cm -es
amatőrsávon történik. A monitorként legjobb használni
videó szemüveget
A képernyőre a gépen elhelyezett OSD
OSD

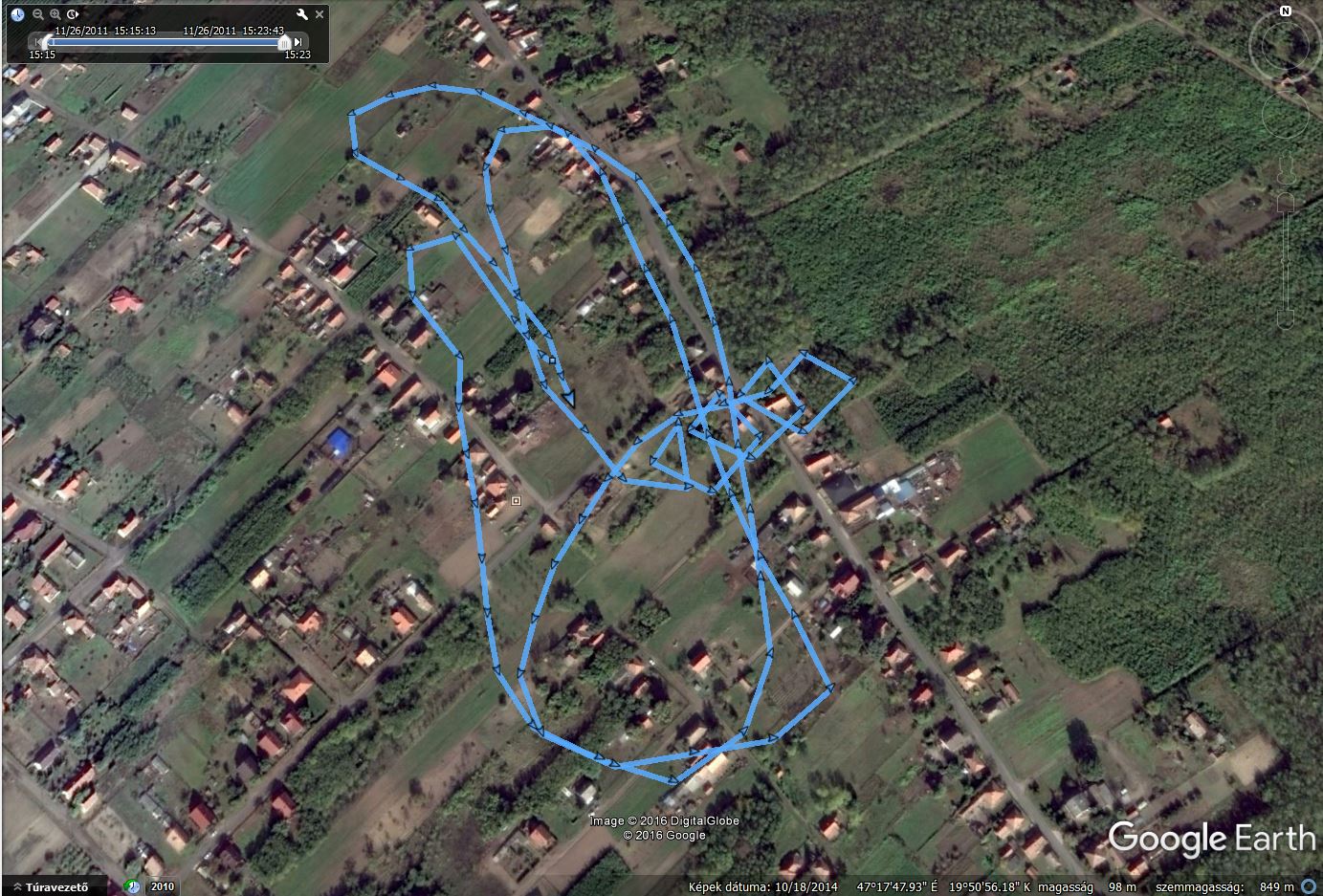
kiírja a fontosabb repülési adatokat, GPS alapján kiszámolja a távolságot, illetve ami nagyon fontos a visszatérés irányát, egyéb szenzorok vannak, áram és feszültség mérők ami kiszámolja az akkumulátorból elfogyasztott töltésmennyiséget mAh-ban, illetve magnetométer, légnyomásmérő a magasság pontos kiszámításához, egyéb extra lehet hogy SD kártyára felveszik a GPS modul NMEA mondatait ezáltal a Google earth-ön lekövethető a repült útvonal;
 illetve robot pilótával is fel lehet szerelni a gépet ami adott útvonalon repül vagy automatikusan visszatéríti a gépet a kiindulási helyre, Működéséhez további szenzorok szükségesek,
illetve robot pilótával is fel lehet szerelni a gépet ami adott útvonalon repül vagy automatikusan visszatéríti a gépet a kiindulási helyre, Működéséhez további szenzorok szükségesek,
3 tengelyes giroszkóp illetve gyorsulásmérő, ami alapján egy összegző algoritmussal a mikrokontroller:
-akár egy 8 bites- kiszámolja a gép pontos szöghelyzetét, ez alapján korrigál illetve vezeti a gépet, a pontos iránytartáshoz precízen beállított
PID
szabályozás szükséges, illetve további szenzorok szükségesek, természetesen itt is a GPS, a magnetométer -ugyanis ha a gép sebessége kicsi akkor a GPS nem szolgáltat haladási irányt-, barométer a pontos magasságméréshez amit a Z tengely gyorsulásmérőjével szintén egy összegző algoritmussal pontos, szabályozásra alkalmas magasság mérésére, illetve ultrahangos magasságmérő:
a kis magasság esetén az automatikus leszállás esetén, régebben használtak a gép szöghelyzetének kiszámolására infra szenzorokat, amely a föld és az égbolt hőmérséklet különbsége alapján működik,
 tulajdonképpen a horizontot látja.
A repülőgép általában elektromos hajtású hab modell,
tulajdonképpen a horizontot látja.
A repülőgép általában elektromos hajtású hab modell,
 illetve robot pilótával is fel lehet szerelni a gépet ami adott útvonalon repül vagy automatikusan visszatéríti a gépet a kiindulási helyre, Működéséhez további szenzorok szükségesek,
illetve robot pilótával is fel lehet szerelni a gépet ami adott útvonalon repül vagy automatikusan visszatéríti a gépet a kiindulási helyre, Működéséhez további szenzorok szükségesek,3 tengelyes giroszkóp illetve gyorsulásmérő, ami alapján egy összegző algoritmussal a mikrokontroller:

|
|

|
The HC-SR04 module sends out an ultrasonic
PINGand then detects its return after bouncing offsomething in the distance. By measuring the round trip time (and knowing the speed that sound travels), a calculation can be made to determine the distance of the object from the HC-SR04. |
vagy a több légcsavaros lebegésre is használható helikopter: trikopter, quadrokopter, hexakopter, oktokopter,
azaz a köznapi szóhasználatban
a drón, ez alkalmas továbbá rendezvények, épületek stb. légi videózására, fotózására, a kamera szögét a koptertől független további giroszkópos , elektromotoros egység stabilizálja. Fontos a légcsavarok pontos kiegyensúlyozása ugyanis vibráció esetén a kép eltorzul, remeg, kisebb képremegést utólag szoftveresen is szokásos kompenzálni.


